两自由度移动装甲板结构设计
这个装置是在大二参加robomaster比赛时为实验室做出的一点小小贡献。
立项背景
RoboMaster 机甲大师机器人大赛是由大疆主办的机器人团队射击对抗赛。在比赛中,机器人需要通过算法自主识别敌方机器人的装甲板并将相关信息转化为执行机构的动作指令。而在调试过程中,若利用机器人做攻击对象,不仅会不可避免地使其中的部件磨损,还会造成资源的浪费。因此,研发一款可移动的视觉测试装置变得很有必要。
在技术和经济发展带动了机器化自动化的高速发展背景下,高稳定性、高精度、高可控性、即时反馈性逐渐成为了现有传统设备不断改进及发展的方向。而在该方向下,基于低成本高收益的移动装甲板模型改变其规模大小,根据用户需求简化或增添新的功能,未来甚至可以应用于教育、生物、医疗等方面,拥有很强的经济性和实用性,在市场上极具竞争力。
项目研究内容及实施方案
移动装甲板采用了极其简洁的设计,装置整体全部采用标准件,既保证了装配精度和调试精度,又有效的降低了零件加工和采购的难度。装置分为三个自由度,分别是X,Y轴移动和Z轴转动,可以使得在旋转平台上的装甲板到达所在平面的任一位置,方便机器人视觉精准定位和校准。国标铝管作为移动装甲板的框架,具有极强的刚度和稳定性,即使在受到击打甚至撞击时也能保证其相对位置的固定。直角连接处都做了相应的加固处理,保证其角度的固定性,从而保证精度。在设计的过程中充分考虑到了线路的安放和电器元件的安装,在X、Y轴的移动方向上安装有拖链。Z轴的旋转通过安装在直线导轨上电机来实现,这里采GM6020直流无刷电机,其具有扭矩密度大、控制精度高、交互方式灵活、保护功能强等特点,适用于低转速、大扭矩直接驱动的应用场景。
该移动装甲板机构的设计图纸全局及部分细节展示图片如下:
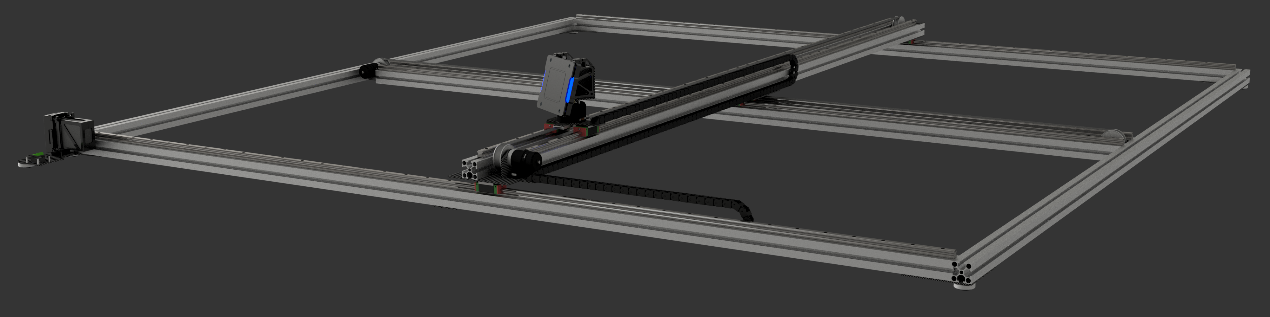
图1 移动装甲板全局图
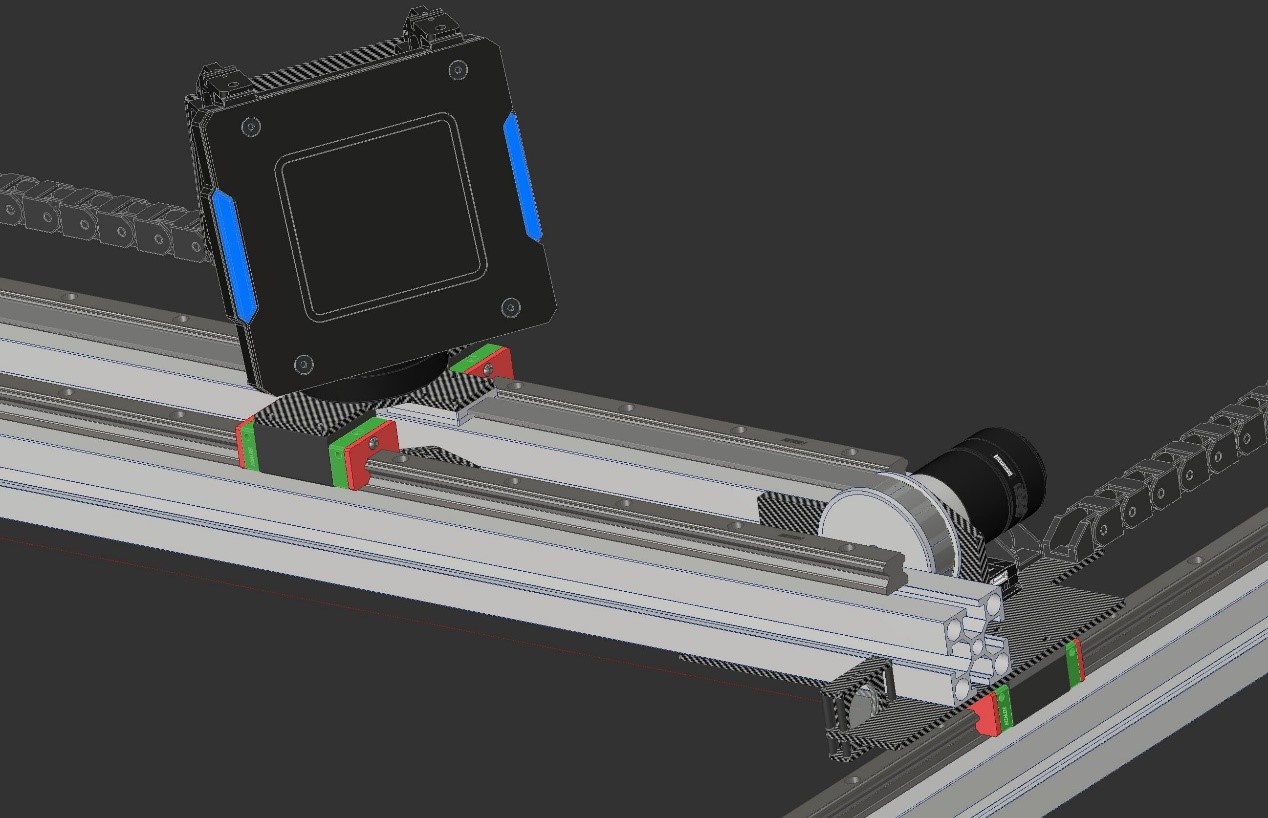
图2 装甲板结构正面图
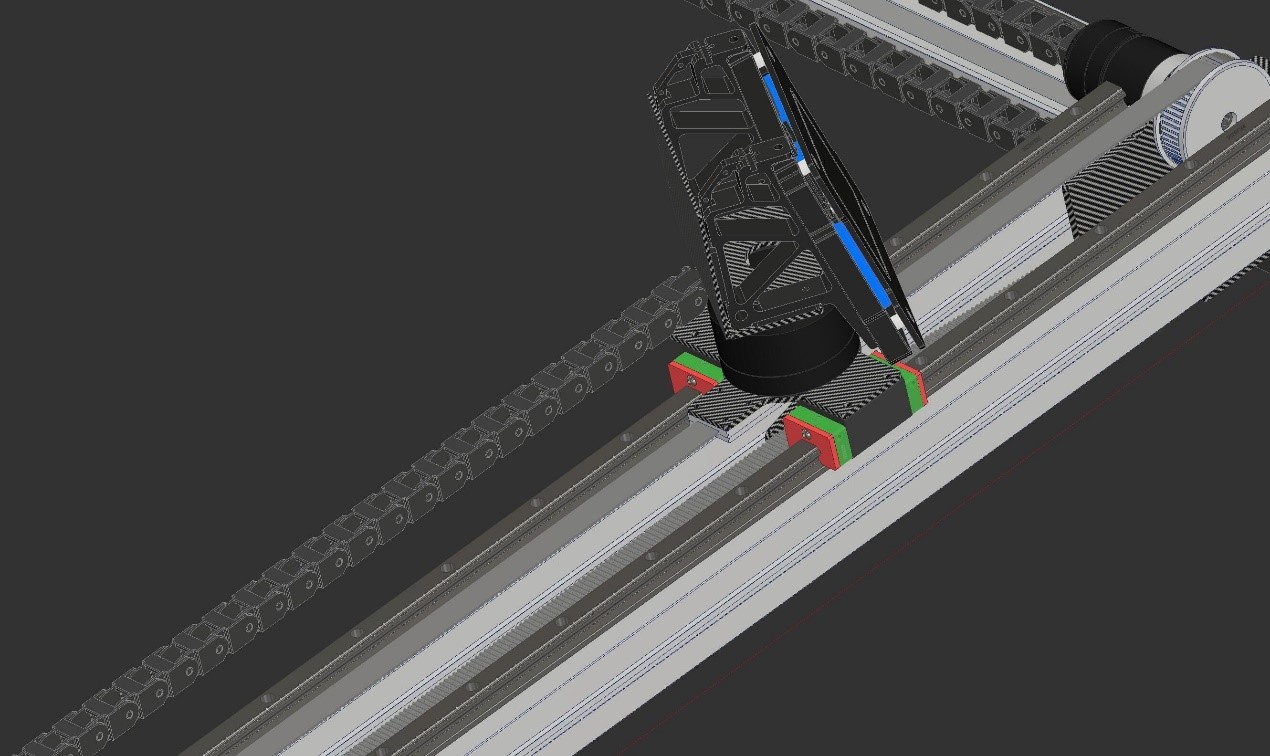
图3 装甲板结构侧面图(展示支架)
经费使用情况
欧标铝管 300
直线导轨 1600
电子器件 200
紧固件 50

