机器人路径规划算法初步了解
一. Astar算法
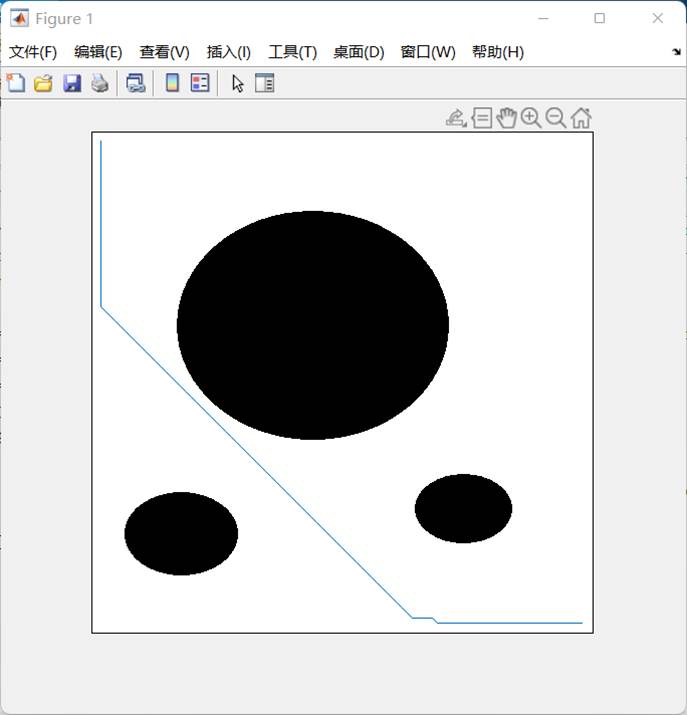
Aster算法是在Dijkstra算法基础上发展出来的,是在静态路径中用于求解最优路径有效的直接搜索算法,比dikstra算法多了一个启发式的搜索函数,也就是通过一个代价函数来确定搜索方向(从起点开始向周围扩张,通过代价函数,计算得到周围每个节点的代价值,选出最小代价节点作为下一个扩展点,重复这个过程直到到达目标点。)。
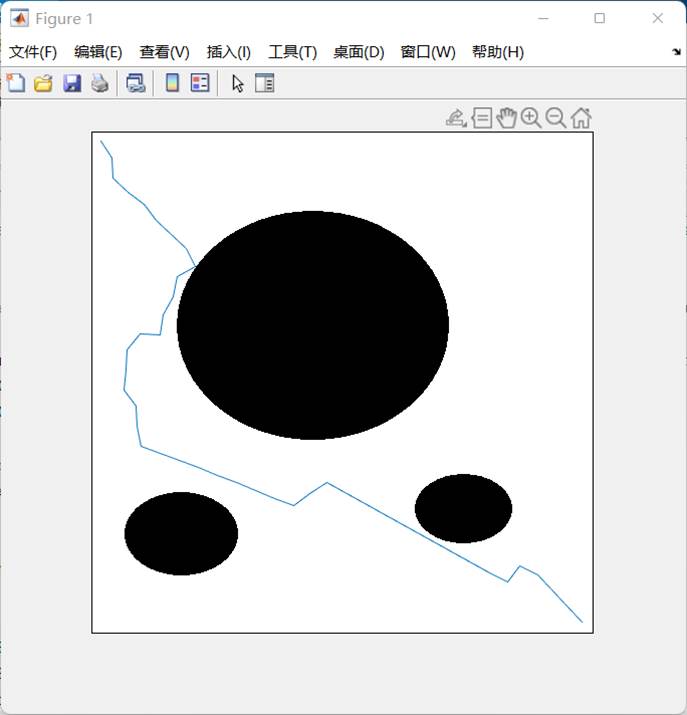
二. RRT算法
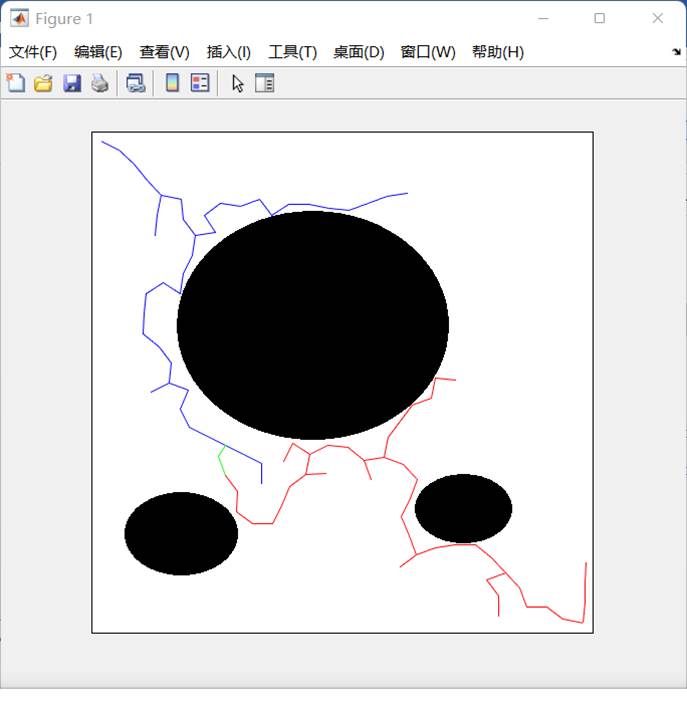
RRT是一种在多维空间中基于采样的规划方法。该方法通过随机探索自由空间,并构建一棵从初始状态开始寻找朝向目标状态的可行路径的树T=(V,E)。在迭代的过程中,创建随机点并搜索距离该点最近的顶点,然后以固定步长得到该方向上的新节点,并检查其是否属于自由空间,直至达到目标。在未占用空间中均匀扩展的属性,使得其在复杂的高维环境、动态环境以及非完整和运动约束环境中依旧有效。
三. Fuzzy
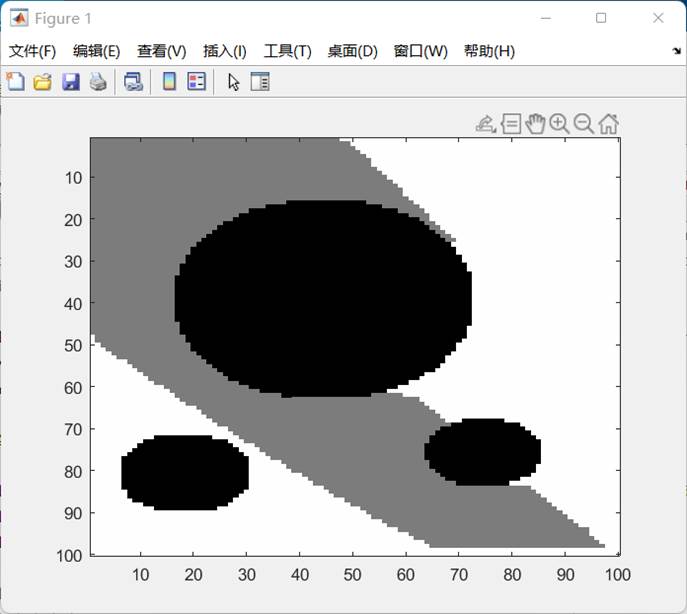
基于模糊的导航是一种反应式规划技术,其中考虑障碍物的当前位置和距离来计算即时移动,而无需考虑未来。以这种方式,即时动作会导致机器人的运动,最终达到目标。为了使用模糊逻辑解决这个问题,我们首先需要选择几个最能代表机器人当前所处位置的输入。运动决策完全基于这些输入,而不是实际情况。对于此问题,选择了6个输入。它们是与前方障碍物的距离、与左前对角线处障碍物的距离、与右前对角线处障碍物的距离、机器人前进方向与目标之间的角度、机器人的距离、从目标和首选转向。最后一个输入,首选旋转指示顺时针或逆时针旋转是否有益,所有其他忽略输入。使用简单规则设置参数。如果前方障碍物距离较远,则转向以面向更多的面目标。如果前方障碍物靠近,并且遇到新的前方障碍物,则使用目标一侧转弯首选。如果前面的障碍物很近,并且发现与上一步中遇到的障碍物相同,则重复先前的转向。模糊系统产生一个单一输出,即转向或即时角速度。模糊的规则的编写应确保机器人能够避开障碍物,并将自身对准目标。模糊系统是在各种情况下,对规则和成员函数进行大量手动调整的结果。
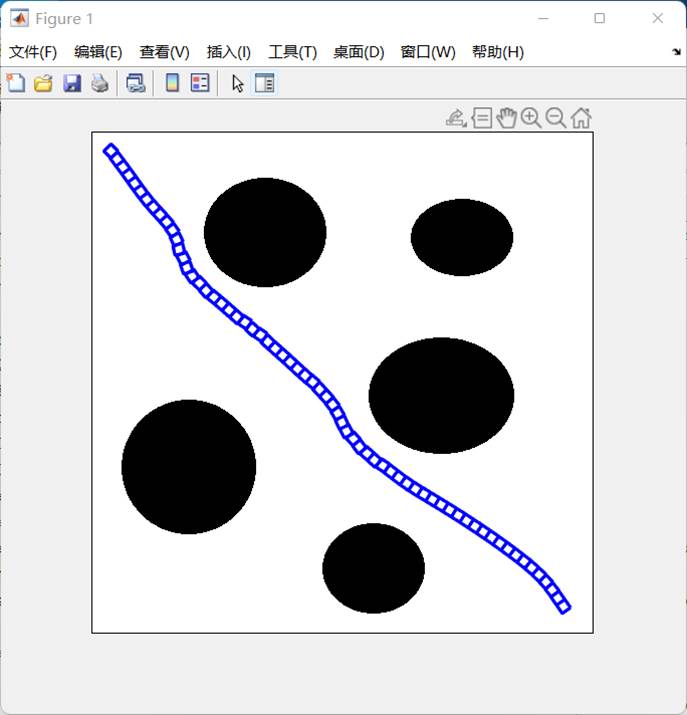
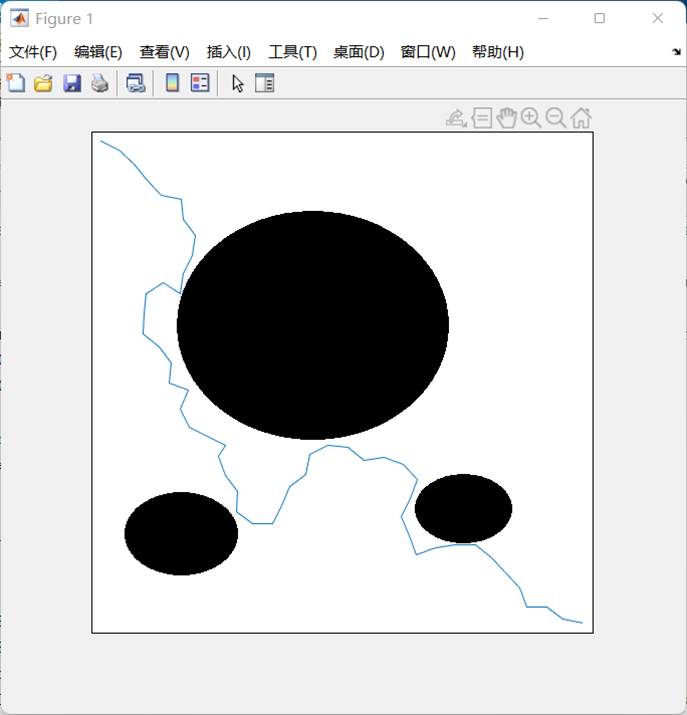
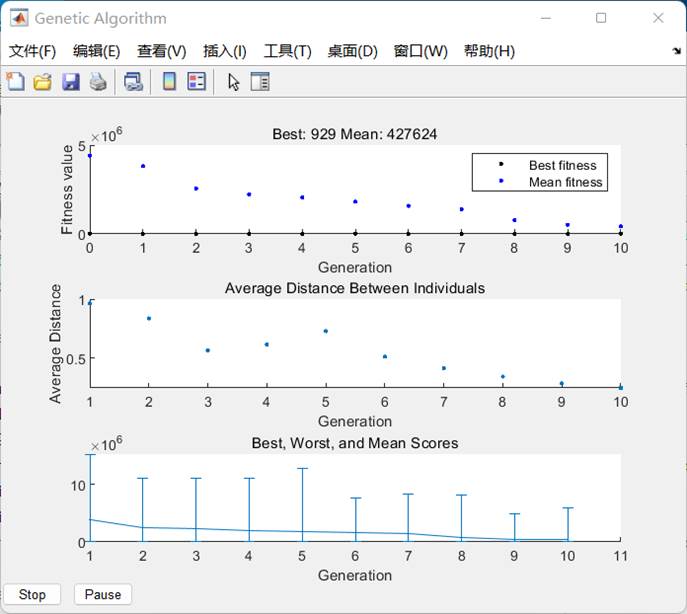
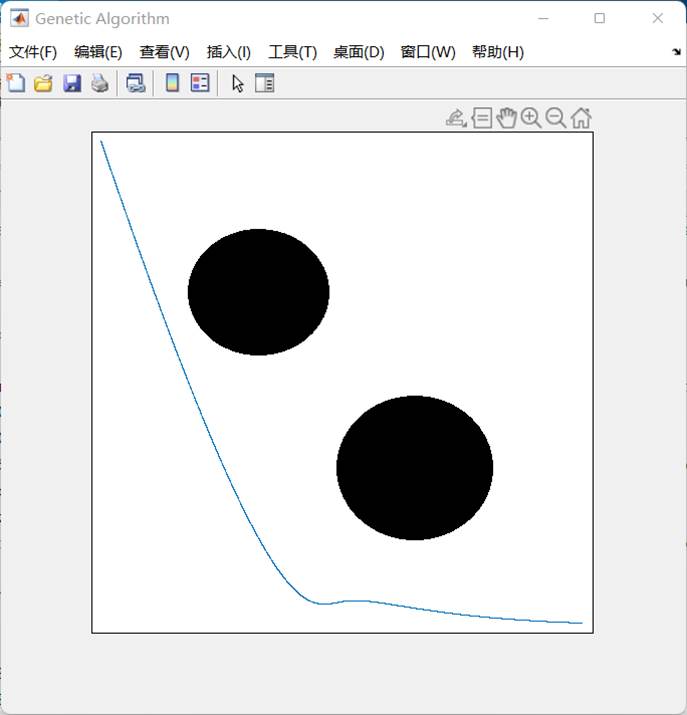
四. GA算法
GA将用作标准优化算法。作为一种优化算法,GA不会要求提供有关衍生工具的任何信息,以便发挥作用。要将问题建模为优化问题,我们需要一个目标函数和变量规格目标函数(及其边界)。设一条路径的特征为机器人地图。为了从这组点创建一些路径,我们从源开始,并将其连接到第一个点用直线指向。第一个点通过直线连接到第二个点,依此类推。最后最后一点与目标相连。目标函数是该路径的长度。如果有,将处以重罚部分路径位于障碍物内,而惩罚与障碍物内路径的长度成比例。每个固定数量点的位置(X轴和Y轴位置)都是优化变量。变量边界使点位于贴图内部(下限为1,上限为长度/宽度X/Y轴的贴图)。所有点(X轴和Y轴值)逐个放置,使遗传个体使用用于优化。路径中的每个点都标记一个转弯点。总点数是一个算法参数,应为等于机器人在机器人地图中预期的最大转动次数。将此数字设置得太高将导致非常大的计算需求。如果算法不允许有大量的计算时间,输出可能是随机结果。在简单场景中设置一个较大的值将导致无用的转弯,因此高路径长度。参数值太小可能无法为算法提供足够的灵活性来建模最佳路径,从而产生容易发生碰撞的路径。
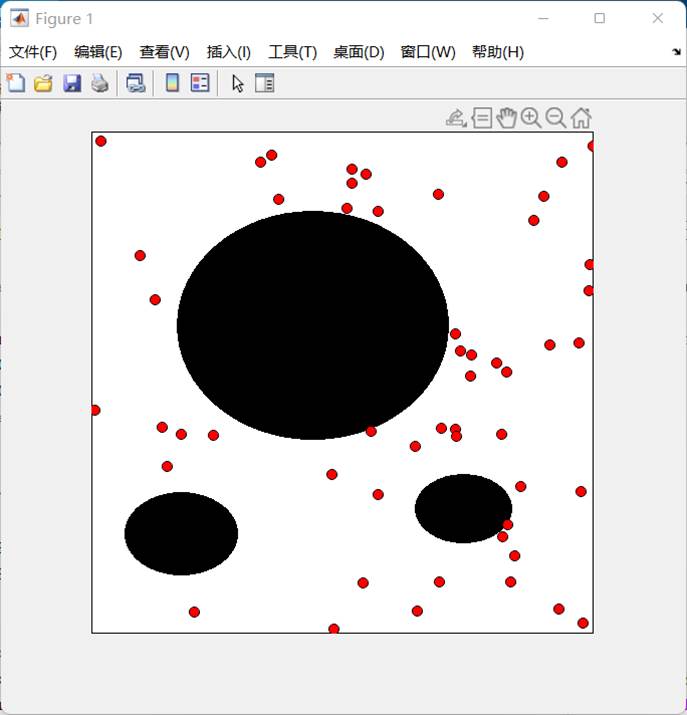
四. PRM
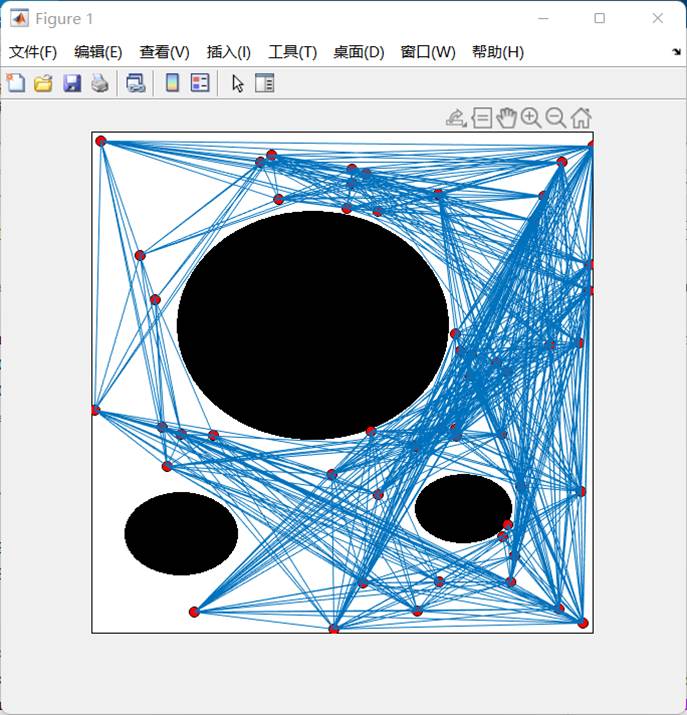
PRM算法分为两个阶段:离线路线图(图)构建阶段和在线规划/查询阶段阶段离线路线图(graph)构建阶段的目的是在图形的所有顶点和边都应无碰撞,以便机器人可以使用相同的图形进行运动规划。PRM在工作空间中选择多个随机点(状态)作为顶点。整齐若要限定为顶点,随机选择的点(状态)不得位于某个障碍物内。设k数作为算法参数的状态数。顶点数或k越大,使用计算时间损失。然后,该算法尝试连接所有随机选择的顶点对。如果有的话两个顶点可以通过一条直线连接,该直线作为边添加。由于图是已知的,所以可以使用任何图搜索算法。代码使用算法来实现相同的功能。边的权重作为连接点之间的欧几里德距离和启发式函数(表示点与目标)作为到目标的欧几里得距离。
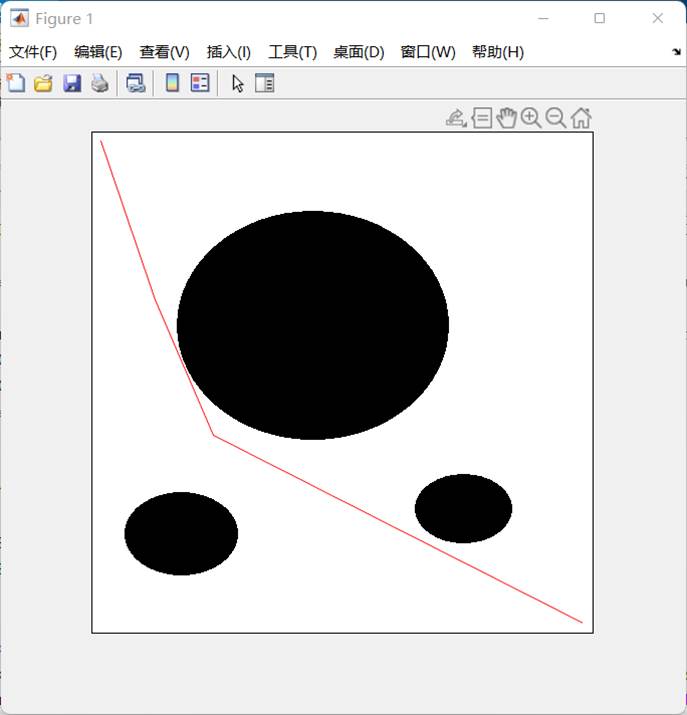
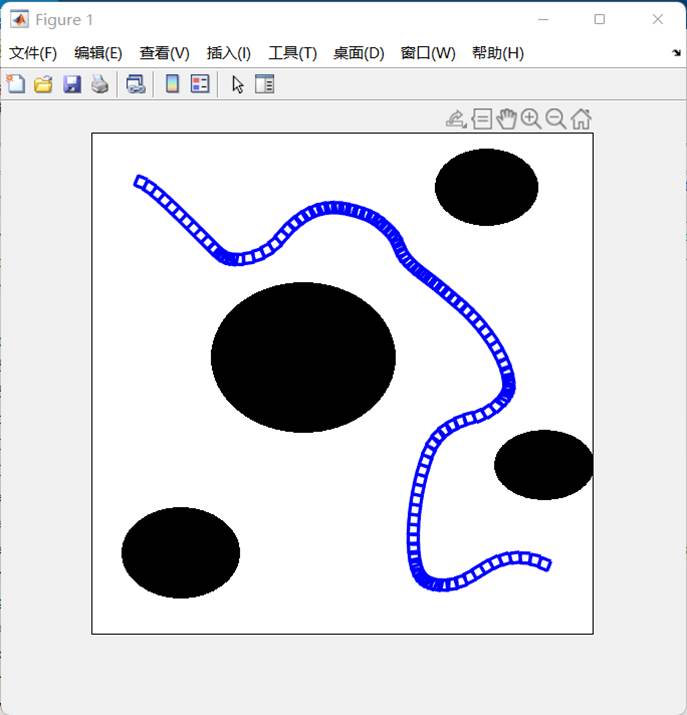
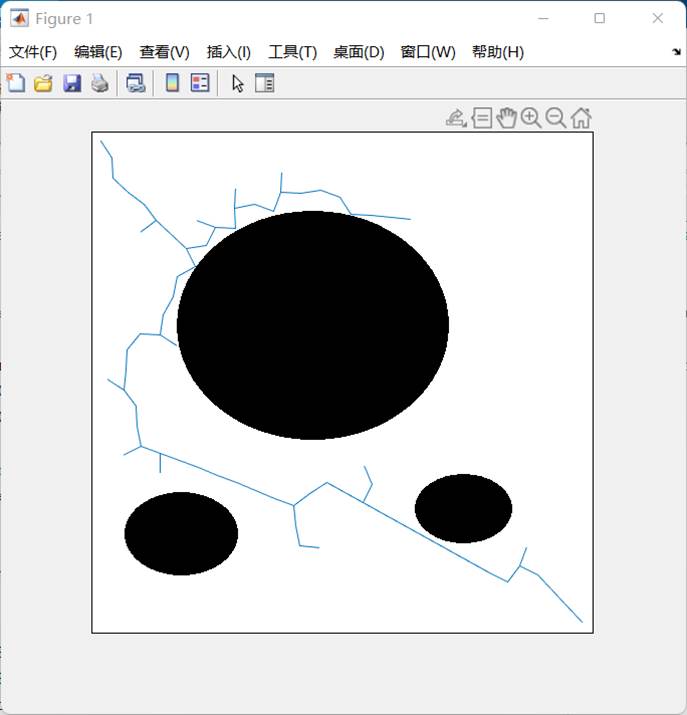
五. RRT算法
RRT算法生长并维护一棵树,其中树的每个节点都是工作区。该算法所探索的区域就是树所占据的区域。最初,算法从将源作为唯一节点的树。在每次迭代中,通过选择随机状态和将树扩展到该状态。通过将树中最近的节点向通过小步选择随机状态。该算法一直运行到某种扩展使树离目标足够近。步长的大小是一个算法参数。较小的值会导致缓慢扩展,但更精细的路径或可以很好地转弯。通过选择目标作为具有一定概率的随机状态。
六. 人工势场法
基于人工势场的导航是一种反应式规划技术,其中障碍物被认为是计算即时移动的工具,而不必担心未来。在这样的情况下立即采取行动的方式引导机器人运动,最终实现目标。所有障碍物都会排斥机器人大小与距离成反比。目标吸引了机器人。合成电势,测量吸引和排斥组件,并将其用于移动机器人。方向表示势向量的方向。测量障碍物在各个角度与机器人之间的距离。在本教程中,在特定位置仅5个距离测量角度以计算排斥势。这些是向前、左侧、右侧、向前左对角线和向前右对角线。