0.序
自学了51单片机之后,通过这个小项目实践一下,在这个过程中,又初步学习和使用了Altium designer和proteus。
1.概述
运用土壤湿度传感器进行数据的收集,然后通过按键调整上下限,再通过单片机对收集数据的分析及处理,进而判断外界土壤湿度值,假如土壤湿度低于设置的下限,单片机控制水泵浇水同时蜂鸣器发出通知,当土壤湿度达到上限就停止浇水,从而达到自动浇花的目的。
硬件有单片机主控、显示、土壤湿度的检测、按键输入、水泵浇灌、蜂鸣器六大模块。主控模块AT89C51单片机负责对数据的分析及处理;YL-69作为湿度检测模块;湿度的上下限是通过按键模块输入;显示模块是显示土壤湿度检测器检测出来的湿度数值及其上限数值;水泵和蜂鸣器是用来执行系统命令。
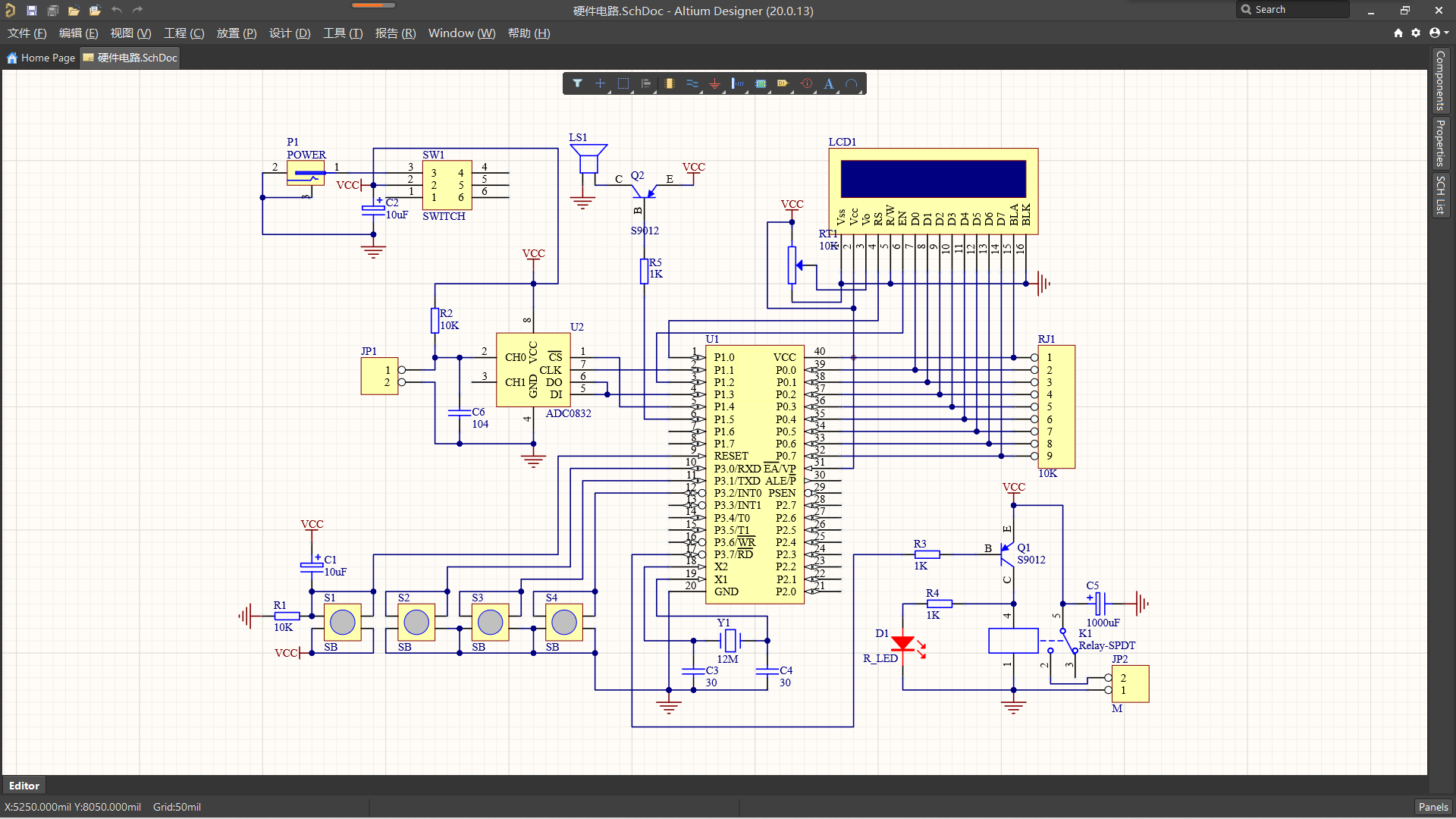
2.硬件电路
Altium designer,软件学习教程https://www.bilibili.com/video/BV1wr4y1n7ZY/?spm_id_from=333.337.search-card.all.click&vd_source=dda96f1fea8a1f6735461fb49a7556eb
3.代码
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207
208
209
210
211
212
213
214
215
216
217
218
219
220
221
222
223
224
225
226
227
228
229
230
231
232
233
234
235
236
237
238
239
240
241
242
243
244
245
246
247
248
249
250
251
252
253
254
255
256
257
258
259
260
261
262
263
264
265
266
267
268
269
270
271
272
273
274
275
276
277
278
279
280
281
282
283
284
285
286
287
288
289
290
291
292
293
294
295
296
297
298
299
300
301
302
303
304
305
306
307
308
| #include <reg51.H>
#include "intrins.h"
#define uint unsigned int
#define uchar unsigned char
#define ulong unsigned long
#define LCDIO P0
sbit ADCLK =P1^1;
sbit ADDIO =P1^3;
sbit ADCS =P1^4;
sbit rs =P1^0;
sbit lcden =P1^2;
sbit key1 =P3^0;
sbit key2 =P3^1;
sbit key3 =P3^2;
sbit motor =P3^7;
sbit speak =P1^5;
uchar key;
uint RH=400,RL=200;
float temp_f;
ulong temp;
uchar v;
uchar count,s1num;
uchar code table[]= " moisture: ";
uchar code table1[]="RH: % ";
uchar getdata;
void delay(uint z)
{
uint x,y;
for(x=z;x>0;x--)
for(y=110;y>0;y--);
}
void write_com(uchar com)
{
rs=0;
lcden=0;
P0=com;
delay(5);
lcden=1;
delay(5);
lcden=0;
}
void write_date(uchar date)
{
rs=1;
lcden=0;
P0=date;
delay(5);
lcden=1;
delay(5);
lcden=0;
}
void lcdinit()
{
lcden=0;
write_com(0x38);
write_com(0x0c);
write_com(0x06);
write_com(0x01);
}
void init()
{
uchar num;
for(num=0;num<15;num++)
{
write_date(table[num]);
delay(5);
}
write_com(0x80+0x40);
for(num=0;num<15;num++)
{
write_date(table1[num]);
delay(5);
}
}
uchar Adc0832()
{
uchar i;
uchar dat =0;
ADCLK =0;
ADDIO =1;
ADCS =0;
ADCLK =1;
ADCLK =0;
ADDIO =1;
ADCLK =1;
ADCLK =0;
ADDIO =0;
ADCLK =1;
ADCLK =0;
ADDIO =1;
for(i=0;i<8;i++)
{
ADCLK =1;
ADCLK =0;
if(ADDIO)
dat|= 0x80>>i;
}
ADCS =1;
ADCLK =1;
ADDIO =1;
return(dat);
}
void displayRH()
{write_com(0xc0+3);
write_date(RH/100%10+0x30);
write_date(RH/10%10+0x30);
}
void displayRL()
{
write_com(0xca);
write_date('R');
write_date('L');
write_date(':');
write_date(RL/100%10+0x30);
write_date(RL/10%10+0x30);
write_date('%');
}
void keyscan()
{
bit kk1 =0,kk2 =0;
if(key1==0)
{
delay(30);
while(key1==0);
if(key>=2)
{
key=0;
}
else
{
key++;
}
switch(key)
{
speak=1;kk2=motor;motor=1;
case 1:
{
write_com(0x0f);
write_com(0xce);
while(key1!=0)
{
if(key2==0)
{
delay(30);
if(key2==0)
{
while(key2==0);
if(RL>=998)
{
RL=999;
}
else
{
RL+=10;
}
}
displayRL();
write_com(0xce);
}
if(key3==0)
{
delay(30);
if(key3==0)
{
while(key3==0);
if(RL<=1)
{
RL=0;
}
else
{
RL-=10;
}
}
displayRL();
write_com(0xce);
}
}
while(key1==0);
}
case 2:
{
write_com(0x0f);
write_com(0xc4);
while(key1==1)
{
if(key2==0)
{
delay(30);
if(key2==0)
{
while(key2==0);
if(RH>=998)
{
RH=999;
}
else
{
RH+=10;
}
}
displayRH();
write_com(0xc4);
}
if(key3==0)
{
delay(30);
if(key3==0)
{
while(key3==0);
if(RH<=1)
{
RH=0;
}
else
{
RH-=10;
}
}
displayRH();
write_com(0xc4);
}
}
while(key1==0);
}
case 0:
{
write_com(0x0c);
motor=kk2;
break;
}
}
}
}
void Conut(void)
{
v=Adc0832();
temp=v;
temp_f=temp*9.90/2.55;
temp=temp_f;
temp=1000-temp;
write_com(0x80+10);
write_date(temp/100%10+0x30);
write_date(temp/10%10+0x30);
write_date('.');
write_date(temp%10+0x30);
write_date('%');
}
void main(void)
{
lcdinit();
init();
displayRH();
displayRL();
delay(50);
delay(50);
delay(50);
delay(50);
Conut();
delay(150);
while(1)
{
Conut();
keyscan();
if(temp>RH)
{
motor=1;
}
else if(temp<RL)
{
motor=0;
}
if(temp<RL)
{
speak=0;
delay(150);
speak=1;
}
keyscan();
delay(150);
}
}
|
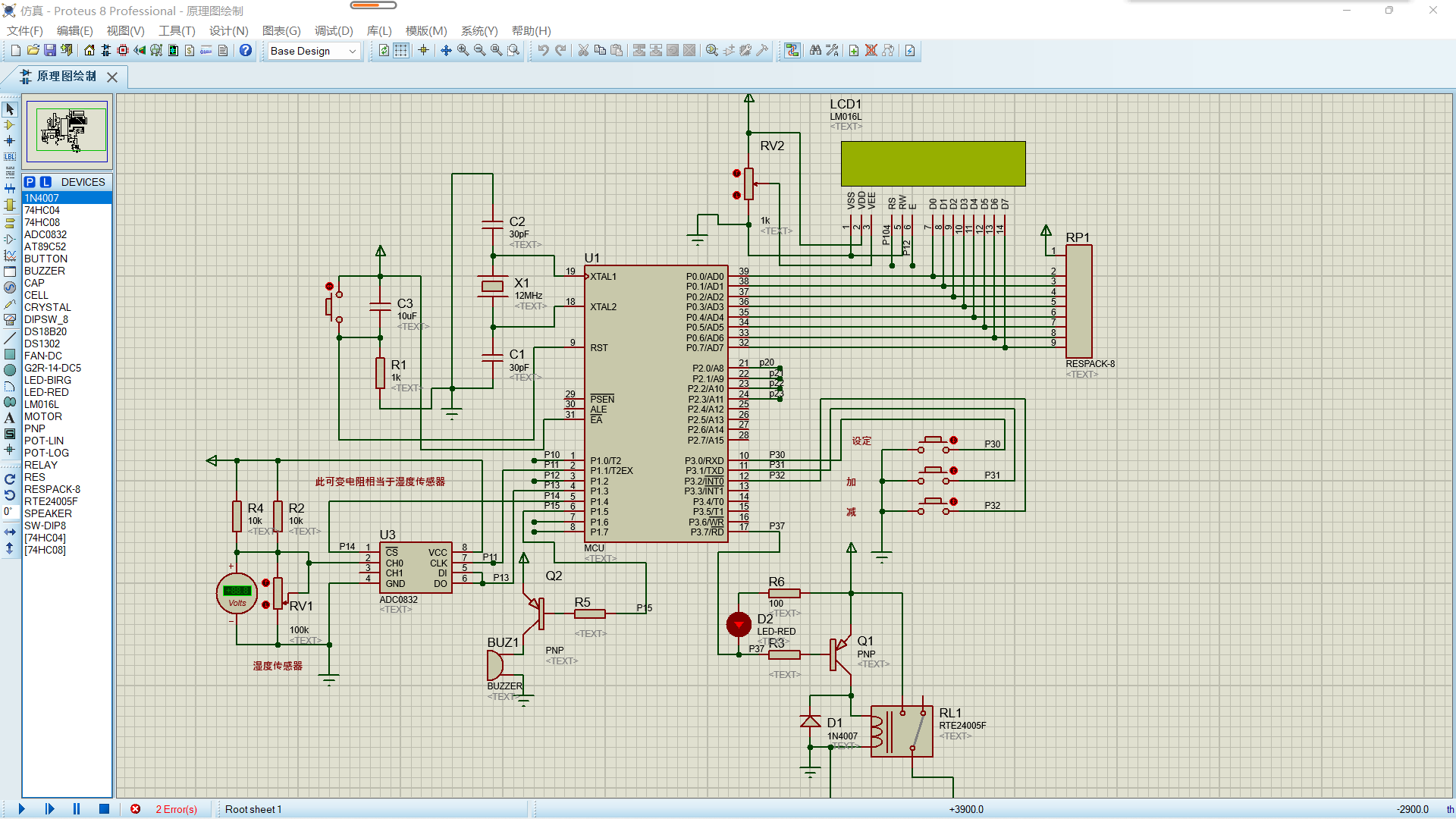
4.仿真
proteus,软件学习教程https://www.bilibili.com/video/BV1Zh41117hg/?spm_id_from=333.337.search-card.all.click&vd_source=dda96f1fea8a1f6735461fb49a7556eb